
1. はじめに
スマホやスマートウォッチで「鍵が開く」体験は、もはや珍しくなくなりました。ところが現実には、近いはずなのに開かない、逆に遠いのに反応しそうで怖い──そんな“距離感の違和感”が残ります。
ここで大事なのは、UWBがcm級で測れるかどうかよりも、いま出ている距離・方位の結果を、どこまで信用していいかです。最近の設計トレンドは、測距そのものを強化するだけでなく、「信頼度(confidence)」を作って使い方を制御する方向へ進んでいます。
2. UWBレンジングの基本
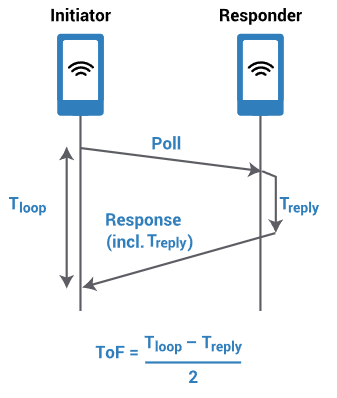
2-1. ToF(Time of Flight):距離は「往復時間」から出す
UWBの距離推定は、電波が届くまでの時間(ToF)をベースにします。一般的にはチャレンジ/レスポンスの往復時間を測って距離に換算します。
UWBが強い理由は、非常に短いパルス(約2ns)と広い帯域(約500MHz)によって、到来タイミングの推定がしやすい点にあります。これが“cm級”という精度の土台です。
2-2. AoA/AoD(方向):距離だけでなく「どっち?」を出す
近接体験で本当に効くのは、距離だけでなく方向(どちら側にあるか)です。例えば、AoA/AoDを使って距離+方向を扱います。
2-3. BLEディスカバリ+UWBセッション:いきなり測らない
実装では、まずBLEで近くの相手を見つけ、接続後にUWBのチャンネル/セッションID/暗号鍵/変調方式などを合意してからレンジングを開始する流れが典型です。
3. 特許から見る技術革新(※方向性の根拠として使用)
3-1. 測距結果に「信頼度」を添えるという発想(US7729659B2)
UWBは距離を測れるだけでなく、「その距離がどれくらい確かか」を“情報として渡す”という設計ができます。
この特許は、レンジング結果に対してconfidence levelやconfidence intervalのような形で品質情報を扱う方向性を示しており、アプリ側は「この距離は“参考値”として扱う」「この距離は“解錠判断に使ってよい”」のように分岐しやすくなります。
3-2. ToF測距を“現場で安定させる”ための設計(US7962150B2)
ToFで測れることと、現場で“安定して使える”ことは別問題です。屋内では反射や遮蔽があり、測距のばらつきが出ます。
この特許は、UWBのToF測距を屋内位置推定に使う際の考え方(複数の測距をどう扱うか、推定をどう収束させるか等)に寄った内容で、「測距値を信じ切らず、扱い方を設計する」という流れの土台になります。
3-3. UWB×IMUの融合:二次センサーが効く理由(US20110025562A1)
“信頼度”を作るとき、比較対象として強いのがIMU(加速度・ジャイロ)です。
この特許は、UWBと慣性計測を組み合わせて姿勢・移動(6DoFの推定など)を扱う方向性を示しており、「UWBの結果だけでなく、二次センサーで“動きの整合”を見る」という設計思想とつながります。
4. 応用分野・実用化
4-1. デジタルキー/スマートロック
「開く・開かない」はUXの核心なので、信頼度を作るメリットが最も大きい領域です。UWBの距離・方向が出ても、センサー整合が悪いなら“今日は慎重に”という判断(追加確認・閾値調整・頻度抑制)ができます。
4-2. “探す”体験(タグ・友だち探し)
矢印UIは便利ですが、反射・遮蔽物で方位が不安定なときに、信頼度がないと「矢印が信用できない」体験になります。ここでも信頼度に応じてUIの強さを変える設計が効きます。
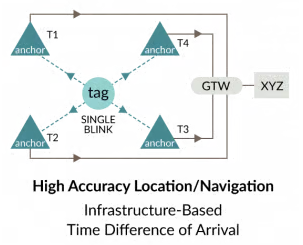
4-3. 屋内測位(RTLS)・ナビゲーション:方式選択の現実(TDoA/TWR/PDoA)
UWBの測位は、目的によって方式が変わります。例えばQorvoの整理では、TDoAは同期が必要な一方で多数台に強く、TWRは同期不要だが電力やスケールの制約が出やすい、PDoAは距離に加えて方位(bearing)を扱える、といったトレードオフがあります。

5. 課題と展望
5-1. 現在の課題:測距の「不確かさ」はゼロにできない
UWBは高精度でも、RF環境や端末の向き、受信視野、前後の曖昧性などで不確かさが出得る、という前提に立つ必要があります。
5-2. 研究の最前線:信頼度(confidence)をOS/プラットフォーム側が持つ
信頼度がアプリごとにバラバラだと体験が破綻します。OSや共通層が信頼度を作って提供し、アプリはそれを前提に「開ける/保留/追加確認」を分岐する。これが“実装しやすいトレンド”です。
5-3. 未来の展望:UWBは「測る技術」から「判断する技術」へ
次の差別化は、cm級そのものではなく、測定値の扱い(信用の付け方・フェイルセーフ・省電力制御)に移っていきます。安全系の用途ほど、この流れは強くなります。
あわせて読みたい
位置推定の本質は“誤差を減らす”より“誤差に気づく”こと——医療現場のカテーテルナビも同じ発想です。

6. 結論
UWBは「cm級で測れる」ことが注目されがちですが、プロダクトが本当に必要としているのは、その測定結果を“いつ・どれだけ”信じていいかです。二次センサーと突き合わせて信頼度を作り、必要ならUWBの利用頻度や判断を抑制する──この設計は、デジタルキーのような安全寄りUXで特に効きます。
関連アイテム
GPSが効かない屋内で、位置や距離を“根拠を持って”扱うには?――屋内測位(Wi‑Fi/BLE/センサー融合など)の全体像を、図解でつかみたい方へ。
『図解よくわかる 屋内測位と位置情報』で、方式の違いと設計の勘所をざっくり整理する
参考文献
テーマに近い関連する特許文献
- WO2025042411A1
https://patents.google.com/patent/WO2025042411A1/en
Source - US7729659B2
https://patents.google.com/patent/US7729659B2/en
Source - US7962150B2
https://patents.google.com/patent/US7962150B2/en
Source - US20110025562A1
https://patents.google.com/patent/US20110025562A1/en
Source
記事を作成するにあたり参考にした文献
- FiRa Consortium – How UWB Works
https://www.firaconsortium.org/discover/how-uwb-works
Source - Qorvo – Ultra-Wideband Technology Overview
https://www.qorvo.com/innovation/ultra-wideband/technology
Source - USENIX Security 2023 – Time for Change: How Clocks Break UWB Secure Ranging (Anliker et al.)
https://www.usenix.org/system/files/usenixsecurity23-anliker.pdf
Source
※ 記事は公開されている特許情報および学術研究をもとに作成しています。図版は各出典元から引用しています。
コメント