
1. はじめに
心臓病の治療において、カテーテルと呼ばれる細い管状の医療器具を使った手術が広く行われています。特に不整脈の治療では、カテーテルを心臓の内部に挿入し、異常な電気信号を発する組織を特定して治療します。しかし、心臓という複雑な三次元構造の中で、カテーテルの位置を正確に把握しながら操作することは非常に困難です。
従来、医師は X線透視装置を使ってカテーテルの位置を確認していましたが、これには放射線被曝のリスクがあり、また二次元画像では正確な位置情報が得にくいという課題がありました。こうした問題を解決するために開発されたのが、カテーテルナビゲーションシステムです。
この技術は、いわば心臓内部の「GPS」のような役割を果たし、カテーテルの位置をリアルタイムで三次元的に追跡します。本記事では、特許技術から見える最新のカテーテルナビゲーションシステムの進化と、それが不整脈治療にもたらす革新について詳しく解説します。
2. カテーテルナビゲーションシステムの基本原理
2-1. 電磁追跡技術の仕組み
カテーテルナビゲーションシステムの中核を成すのが、電磁追跡技術です。この技術は、患者の体外に設置された電磁場発生装置と、カテーテル先端に組み込まれた微小センサーの組み合わせによって機能します。
電磁場発生装置は、患者の胸部の下に配置され、特定の周波数の電磁場を発生させます。カテーテル先端のセンサーは、この電磁場の強度と方向を検出し、それを基に三次元空間内での正確な位置と方向を計算します。この原理は、GPS が衛星からの信号を利用して位置を特定するのと似ていますが、より小さなスケールで、より高い精度を実現しています。
{kind=link}
2-2. 電気解剖学的マッピングとの統合
カテーテルナビゲーションシステムのもう一つの重要な機能が、電気解剖学的マッピング(Electroanatomic Mapping)です。これは、カテーテルの位置情報と、その位置で記録される心臓の電気信号を同時に取得し、心臓の三次元形状と電気活動を可視化する技術です。
医師がカテーテルを心臓内部で移動させながら複数のポイントでデータを収集すると、システムは自動的に心臓の詳細な三次元モデルを構築します。このモデル上には、各位置における電気信号の強度や伝導のタイミングがカラーマップとして表示され、不整脈の原因となる異常組織を視覚的に特定できるようになります。
2-3. リアルタイム可視化とフィードバック
現代のカテーテルナビゲーションシステムは、リアルタイムでの可視化機能を提供します。医師は大型ディスプレイ上で、カテーテルの現在位置、移動軌跡、心臓の三次元モデル、電気活動マップなどを同時に確認できます。
さらに、システムは治療に役立つ様々なフィードバック機能を備えています。例えば、カテーテルと心臓壁との接触圧を測定し、適切な圧力で治療を行えるようサポートします。また、過去に治療を行った部位を記録し、治療の進捗状況を視覚的に管理することも可能です。
3. 特許から見る技術革新
3-1. 画像ガイド式カテーテルナビゲーションシステム(US8060185B2)
2011年に発行された US8060185B2 特許は、画像誘導型のカテーテルナビゲーションシステムに関する重要な技術を開示しています。この特許の特徴は、CT や MRI などの事前撮影画像と、リアルタイムの電磁追跡情報を統合する点にあります。
従来のシステムでは、カテーテルの位置は電磁追跡のみに依存していましたが、この技術では患者の実際の解剖学的構造を示す医用画像とリアルタイムのカテーテル位置を重ね合わせて表示します。これにより、医師は患者固有の心臓構造を詳細に把握しながら、より安全で正確な治療を行えるようになりました。
また、この特許はコントローラーとディスプレイの連携システムについても詳述しており、複数の画像モダリティ(画像の種類)を統合して表示する手法を提案しています。
参考: US8060185B2 – Navigation system for cardiac therapies
3-2. カテーテル位置マッピングシステム(US5983126A)
1999年に発行された US5983126A 特許は、カテーテル電極の位置を体内でマッピングするシステムと方法を開示しています。この特許は、カテーテルナビゲーション技術の基礎を築いた重要な発明の一つです。
この技術の核心は、体表に配置された複数の基準電極と、カテーテル上の電極との間の電気的関係を利用して、カテーテルの三次元位置を計算する方法にあります。体内の電気伝導特性を考慮したアルゴリズムにより、ミリメートル単位の位置精度を実現しました。
特に注目すべきは、このシステムが複数の電極を持つカテーテルに対応し、カテーテル全体の形状や向きを把握できる点です。これにより、カテーテルの先端だけでなく、シャフト全体の位置関係を理解しながら操作できるようになりました。
参考: US5983126A – Catheter location system and method
3-3. 高密度電極マッピングカテーテル(US11039773B2)
2021年に発行された US11039773B2 特許は、高密度電極を搭載したマッピングカテーテルに関する技術です。この特許の革新性は、カテーテル上に配置された多数の電極により、一度に広範囲の電気信号を収集できる点にあります。
従来のカテーテルでは、数個の電極で順次データを収集していたため、心臓全体のマッピングに時間がかかっていました。この高密度電極技術により、一度の接触で広い範囲の詳細な電気マップを作成できるようになり、手術時間の大幅な短縮が実現されました。
また、この特許は医療用位置測定システムと統合する方法についても記述しており、各電極の正確な位置情報と記録された電気信号を関連付けることで、より精密な電気解剖学的マップの生成を可能にしています。
図2: 電気解剖学的マッピングシステムの例

参考: US11039773B2 – High density electrode mapping catheter
4. 臨床応用と実用化
4-1. 心房細動アブレーション治療への応用
カテーテルナビゲーションシステムの最も重要な応用分野の一つが、心房細動のアブレーション治療です。心房細動は、心房が不規則に細かく震える不整脈で、脳梗塞のリスクを高めることが知られています。
アブレーション治療では、不整脈の原因となる異常な電気回路を高周波エネルギーで焼灼します。ナビゲーションシステムを使用することで、肺静脈周囲の複雑な解剖学的構造を正確に把握し、確実に異常組織を治療できるようになりました。さらに、治療済みの領域を記録することで、治療の抜けや重複を防ぎ、手術の成功率を向上させています。
Nature Scientific Reportsに発表された2023年の研究では、非透視下での心房細動アブレーション治療の実行可能性が示され、X線被曝を完全に回避しながら高い成功率を達成できることが報告されています。
参考: Feasibility study of cryoballoon ablation for atrial fibrillation with zero fluoroscopy
4-2. ロボティックカテーテルナビゲーション
近年、カテーテルナビゲーションシステムとロボット技術の融合が進んでいます。ロボティックカテーテルシステムでは、医師がコンソール(操作卓)からカテーテルを遠隔操作し、より精密で安定した操作を実現します。
2025年にNature Scientific Reportsで発表された最新研究では、磁気流体を利用した革新的なマスタースレーブ型ロボットカテーテルシステムが紹介されています。このシステムは、医師の手の動きをリアルタイムで再現し、さらに触覚フィードバック機能により、カテーテルが組織に接触する感覚を医師に伝えることができます。
こうしたロボット支援システムにより、医師は放射線から離れた安全な場所から手術を行え、また手の微細な震えの影響を排除した精密な操作が可能になります。
参考: An advanced robotic system incorporating haptic feedback for cardiac ablation
4-3. MRIガイド下心臓カテーテル治療
X線透視に代わる新しいアプローチとして、MRI(磁気共鳴画像法)ガイド下でのカテーテル治療の研究が進められています。MRI は放射線を使用せず、軟部組織のコントラストに優れているため、心臓の詳細な構造を可視化しながら治療を行えます。
2022年にNature Scientific Reportsで発表された研究では、MRI ガイド下でのカテーテル追跡と、同時に心臓の温度をモニタリングする技術が報告されています。この技術により、アブレーション治療中の組織温度を正確に測定し、過度な熱損傷を防ぐことができます。
MRI 対応カテーテルの開発には技術的課題が多く残されていますが、将来的には放射線被曝ゼロで、より安全な心臓治療を提供できる可能性があります。
参考: Continuous cardiac thermometry via simultaneous catheter tracking and imaging
5. 課題と展望
5-1. 精度向上とエラー低減の課題
カテーテルナビゲーションシステムは高い精度を実現していますが、さらなる改善の余地があります。電磁追跡システムは、金属製の医療機器や手術台の影響を受けることがあり、これが位置精度の誤差につながる可能性があります。
2022年にBMC Cardiovascular Disordersで発表された研究では、空間補正技術を用いることでカテーテル位置精度が向上することが示されています。この研究では、心室性期外収縮のアブレーション治療において、空間的なずれを補正する技術が治療成功率の向上に寄与することが報告されました。
今後は、AI(人工知能)を活用した誤差補正アルゴリズムや、複数のセンシング技術を組み合わせたハイブリッドシステムの開発が期待されます。
参考: Spatial correction improves accuracy of catheter positioning during ablation
5-2. 自動化と知能化の進展
カテーテルナビゲーションシステムの次なる進化は、AI による自動化と知能化です。現在のシステムは、医師がカテーテルを手動で操作し、判断を下すことを前提としていますが、将来的にはAI がリアルタイムで電気マップを解析し、治療すべき最適な部位を提案したり、自動的にカテーテルを誘導したりする技術の開発が進められています。
また、機械学習を用いた画像認識技術により、事前の医用画像からリアルタイムのカテーテル位置を自動的に同定し、レジストレーション(位置合わせ)を行うシステムも研究されています。これにより、手術の準備時間が短縮され、より多くの患者に治療を提供できるようになるでしょう。
5-3. 低侵襲化と治療効率の向上
カテーテルナビゲーション技術のさらなる進化により、治療の低侵襲化と効率向上が期待されます。Springerで2025年に発表された研究では、最新の磁気ナビゲーションシステム(MAGiC RMN)を用いた初の臨床結果が報告され、様々な不整脈に対して良好な急性期の有効性と安全性が示されました。
図3: 先進的な電気解剖学的マッピング技術
今後は、より小型で柔軟なカテーテル、高解像度のマッピング技術、そして患者ごとにカスタマイズされた治療計画の自動生成などが実現され、心臓病治療の質と効率が飛躍的に向上することが期待されます。
参考: First in-human results of the MAGiC robotic magnetic navigation system
あわせて読みたい
ナビゲーションで位置が分かっても、治療の意思決定には心臓内の電気活動を可視化する3Dマッピングが欠かせません。

推定で欠けた情報を埋める”という発想は医療データでも重要です。低カバレッジ×インピュテーションの解説もどうぞ。
6. 結論
カテーテルナビゲーションシステムは、心臓内部という見えない世界に「目」を与え、治療の精度と安全性を飛躍的に向上させた革新的技術です。電磁追跡、電気解剖学的マッピング、画像統合といった複数の技術を組み合わせることで、医師は心臓の三次元構造と電気活動を詳細に把握しながら、ミリメートル単位の精密な治療を行えるようになりました。
特許技術の進化を見ると、初期の基本的な位置追跡から、高密度電極マッピング、ロボット支援、さらには MRI ガイド下治療へと、システムは着実に進化し続けています。これらの技術により、X線被曝の低減、手術時間の短縮、治療成功率の向上といった多くの恩恵がもたらされています。
今後、AI による自動化や知能化がさらに進むことで、カテーテルナビゲーションシステムは単なる「見る」ツールから、「考え、提案する」パートナーへと進化していくでしょう。心臓病で苦しむ多くの患者にとって、これらの技術革新は希望の光となり、より安全で効果的な治療への道を切り拓いていくことが期待されます。
関連アイテム
カテーテルアブレーションの流れ(事前準備〜当日〜術後)を、先に把握しておきたい方へ。
「やさしくわかるカテーテルアブレーション」で治療の流れを把握
参考文献
テーマに近い関連する特許文献
- US8060185B2 – Navigation system for cardiac therapies (2011年発行)
https://patents.google.com/patent/US8060185B2/en - US5983126A – Catheter location system and method (1999年発行)
https://patents.google.com/patent/US5983126A/en - US11039773B2 – High density electrode mapping catheter (2021年発行)
https://patents.google.com/patent/US11039773B2/en
記事を作成するにあたり参考にした文献
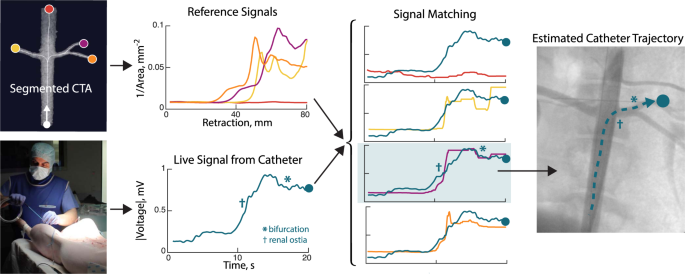
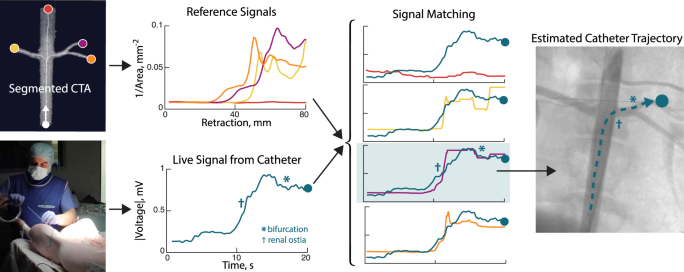
- Nature Scientific Reports (2020) – “Biologically Inspired Catheter for Endovascular Sensing and Navigation”
https://www.nature.com/articles/s41598-020-62360-w - Nature Scientific Reports (2023) – “Feasibility study of cryoballoon ablation for atrial fibrillation with zero fluoroscopy”
https://www.nature.com/articles/s41598-023-49475-6 - Nature Scientific Reports (2025) – “An advanced robotic system incorporating haptic feedback for cardiac ablation catheter”
https://www.nature.com/articles/s41598-025-91342-z - Nature Scientific Reports (2022) – “Continuous cardiac thermometry via simultaneous catheter tracking and imaging”
https://www.nature.com/articles/s41598-022-06927-9 - BMC Cardiovascular Disorders (2022) – “Spatial correction improves accuracy of catheter positioning during ablation of premature ventricular contractions”
https://bmccardiovascdisord.biomedcentral.com/articles/10.1186/s12872-022-02741-3 - Springer – Journal of Interventional Cardiac Electrophysiology (2025) – “First in-human results of the MAGiC robotic magnetic navigation system for ablation catheter”
https://link.springer.com/article/10.1007/s10840-025-02082-z - Springer – Current Cardiology Reports (2024) – “Advanced Electroanatomic Mapping: Current and Emerging Approaches”
https://link.springer.com/article/10.1007/s11936-024-01034-6
※ 記事は公開されている特許情報および学術研究をもとに作成しています。図版は各出典元から引用しています。
コメント